MapleSim的模擬研究- 原子力顯微探針之滯滑運動
第二屆物理建模創意競賽之目的係使用由加拿大符號與物理建模開發大廠Maplesoft公司所開發之多領域物理建模工具MapleSim建立具動態功能之多體機構模型,例如守球員機器人、取物機械手臂、懸吊機構等,並在60秒內的影片或動畫檔中,表現其執行的結果與能力。
國立台灣海洋大學機械與機電工程學系周昭昌老師二度帶領學生劉哲源以及楊欽全同學參與2012年思渤科技舉辦之物理建模比賽再度拔得頭籌,全程採用Maplesoft公司所開發之MapleSim軟體進行建模,並以模型複雜度與概念兩大項目取得最高的分數。

|
劉哲源與楊欽全同學以原子力顯微探針之滯滑運動為研究內容獲得比賽第一名
左起為國立台灣海洋大學楊欽全同學、國立台灣海洋大學劉哲源同學 以及思渤科技總經理鄭明宏 |
本次投稿之背景與動機
有關原子力顯微鏡(AFM)之探針於乾摩擦環境中的滯滑運動,鄒明衡(2009)曾在他的碩士論文中建立模型,並用數值方法加以模擬和探討。
由於滑動摩擦的物理現象相當複雜,海大的參賽同學透過MapleSim物理建模來模擬原子力顯微探針在考慮相同因素時的滯滑運動,對種種因素的影響和交互作用做出同樣的模擬和比較。
由於滑動摩擦的物理現象相當複雜,海大的參賽同學透過MapleSim物理建模來模擬原子力顯微探針在考慮相同因素時的滯滑運動,對種種因素的影響和交互作用做出同樣的模擬和比較。
海大同學透過MapleSim軟體建立Tomlinson機構(圖三)來模擬探針的運動行為,以串聯彈簧代表探針掃描系統的剛性,以一滑塊及其速度變化當作慣性質點與消耗能量中的阻尼項,並另外定義材料表面隨結構做週期性分布的位能函數,如此可以此簡單機械模型來代表點接觸的滑動行為,除了考慮基座滑動速度外,還考慮了不同的接觸阻尼系統、溫度效應(一種隨機的布朗運動)、以及有效彈簧常數等因素。在模型中做了必要的微觀力學定義,並給予適當的運動速度變化,最後以鄒明衡(2009)的論文為基礎,比較模擬結果(圖五)的正確性。
.jpg)
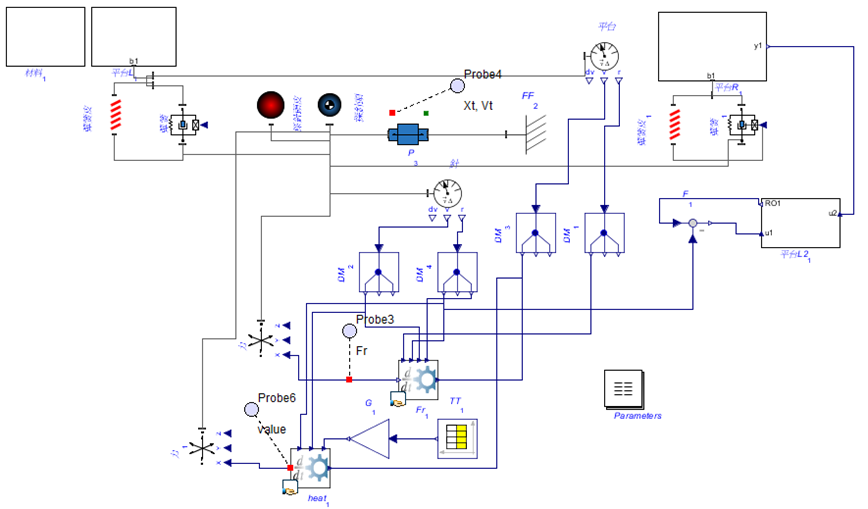
使用MapleSim進行原子力顯微鏡探針運動模型建立
下圖為原子力顯微鏡探針運動之MapleSim模型,其中使用MapleSim多體元件庫(Multibody)中的元件,使用者自定義方程式方式建立客制化元件(Custom Component)、更利用Random Data Template建立隨機數據當作Noise來源放入模型中,最後使用Signal Blocks中的元件來建立運動控制行為。
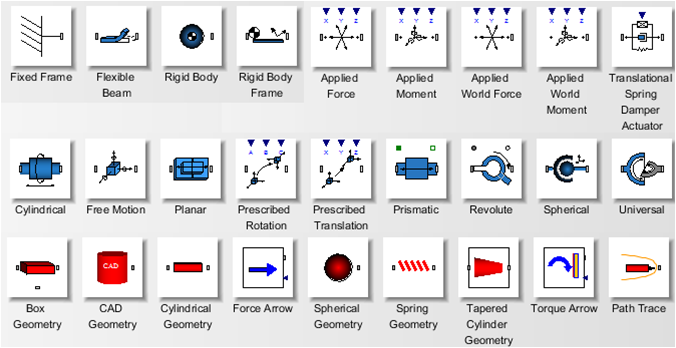
1. 基本元件庫之多體機構元件:
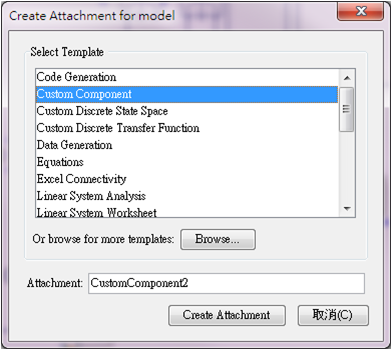
2. 使用自定義方程式建立客製化元件:
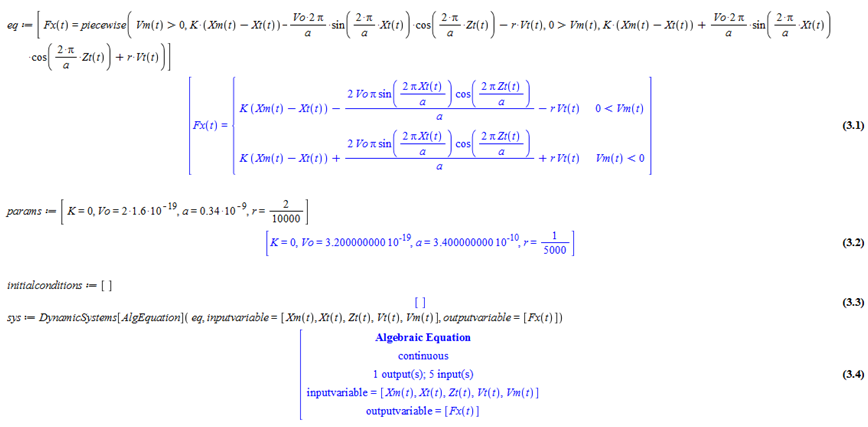
a.考慮基座滑動速度與不同阻尼值之探針移動方程式
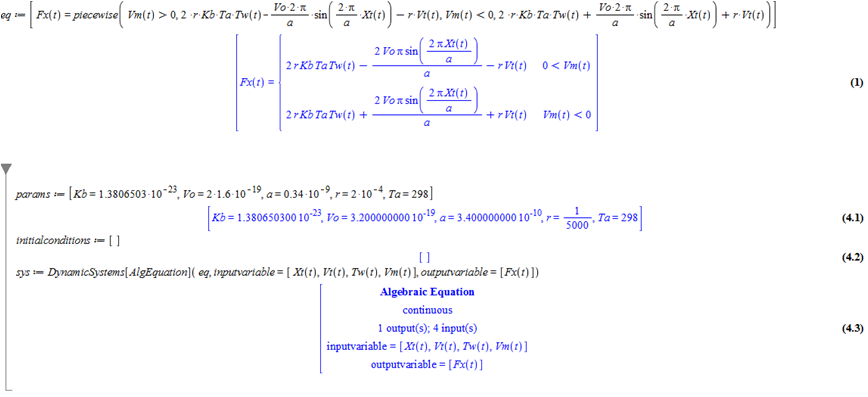
b.考慮基座滑動速度、不同阻尼值以及溫度效應之探針移動方程式
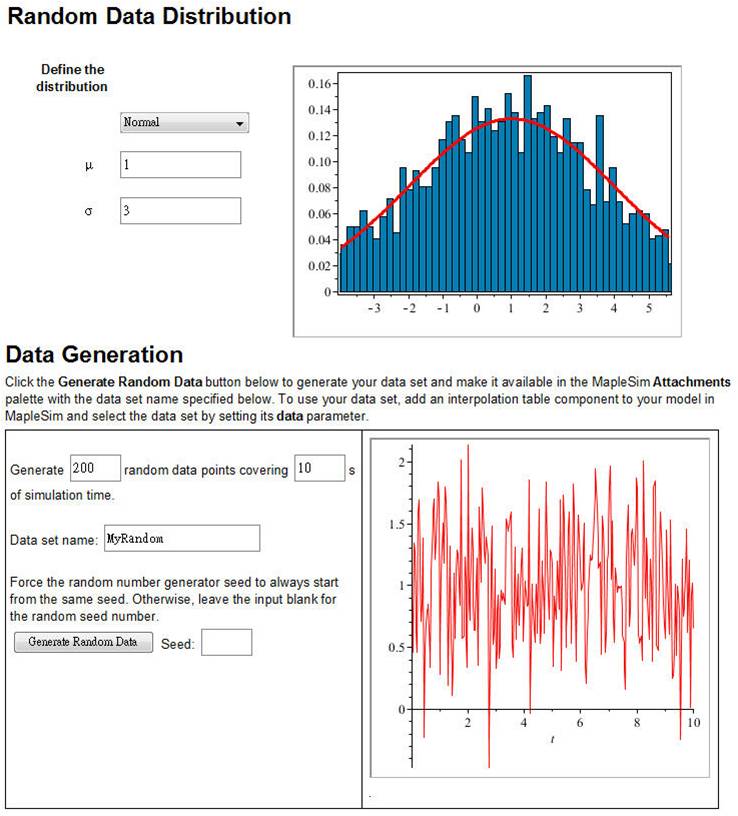
3. 使用Random Data Template建立隨機數據:
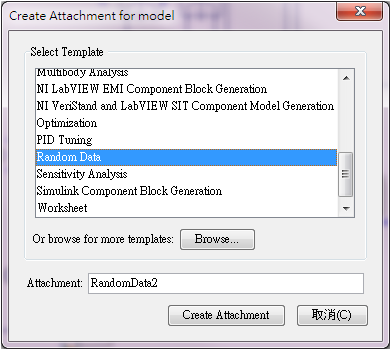
透過Maple所建立的Template,建立隨機數據放入模型中當作Noise來源,其中數據類型可以由使用者自由選定,如此範例選定Normal分佈,設定平均值μ為1,標準差為3σ之數據。
模型架構
.jpg)
這次使用的物理建模軟體MapleSim是海大同學從未接觸過的軟體,而且也未曾有微觀機構模型的前例可依循,然而在實際使用時並沒有遇到什麼太大的困難,因為它的建模原理都很直觀,經由資料庫還可以建立一些自定元件,讓這次的作品從無到有大概只花了幾十天的時間就完成了。MapleSim的優點還不只這樣,它還能將建立的模型轉化成為動畫來讓我們可以更進一步直接觀察模型的運動模式。
3D動畫結果
.gif)
(本文來源為海大參賽同學之投稿文件,未經許可,請勿擅自剪貼、複製或做任何商業用途。)