應用 MapleSim 於複雜光學系統的運動模擬
光學系統的光線追跡模擬通常會在光學元件於完美校正的理想情況下進行,然而真實情況中,因為諸多因素有時必須對元件進行移動。承載這些元件的平台可能相當複雜,唯有透過模擬其運動行為才能了解對整體系統性能的影響。在此應用案例中,我們使用MapleSim去探索和深入研究反射鏡及其平台的運動行為,並且量化致動器調整過程中可能發生的交叉耦合運動,模擬出的位置資訊可用於降低誤差、改善光線追跡的模擬結果與協助系統的校正。
世界級的同步加速器研究機構─加拿大光源公司(Canadian Light Source Inc.),其內部的技術團隊日前使用 MapleSim 作為工具,模擬六柱運動鏡射平台 的位置,此裝置的模型能夠輕易於 MapleSim 環境中建立,並且從模型自動產生 系統動態方程式,最後藉由 Maple 符號運算引擎對方程式加以簡化。運動致動器 的運動模擬結果可以呈現反射鏡的位置和方向,而這些結果可作為光線追跡模擬 的輸入資訊。加拿大光源公司的 Alan Duffy 指出「MapleSim 是一套高效率的模 擬工具,能夠分析極為複雜的系統並快速得到滿足精度要求的結果,非常適合用 於模擬位置精度在微米等級的光學平台。」
六柱運動鏡射平台的運動行為是由各別支柱移動而得的弧形軌跡,其所產生 的餘弦誤差會造成其他獨立軸些微的耦合,因此,任意方向的運動都可能造成另 一個方向的輕微偏移並且改變旋轉方向。如果沒有對位置和方向上的改變進行適 當的量化,可能會影響光線追跡結果的精確性。
.bmp)
六柱運動鏡射平台系統
MapleSim 提供定位推斷與六柱運動平台轉向等運動控制的馬達模型。透過 更實際的了解六軸支柱系統的運作有利於光束的校準與性能的提升。加拿大光源 團隊的最終目標是建立即時 x-ray 追跡系統,利用光束控制系統定位出光學元件 的位置,再傳送這些結果作為 x-ray 追跡程序的輸入資訊。
MapleSim模型使用特定領域元件,例如以訊號元件或是多體機構元件建立。 支柱的部分使用一個 3-D rigid body 元件、兩個 rigid body frame 元件以及兩個 spherical joint 元件,這些元件分類在 Multibody 元件庫中。MapleSim 模 型也可以透過 CAD Geometry 元件,將系統機構的幾何外形以 STL 檔案匯入到模 型中,建立系統運動的模擬動畫。利用 Maple 的符號運算引擎進行模型方程式處 理簡化,可以減少系統統御方程式數目,但又不會因此失去模型的精確性。 MapleSim 也可將模型轉換為系統,並建立在自建的元件庫中當作子系統元件。
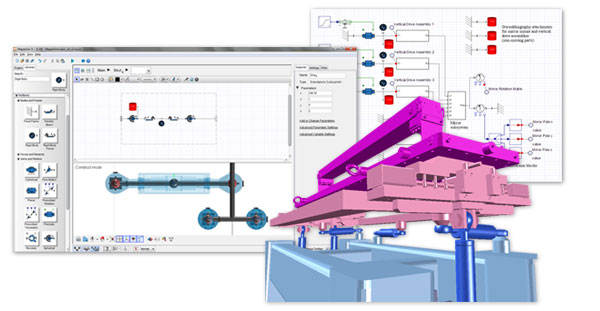
支柱子系統示意圖(上半部),3-D架構系統上視圖(下半部),2-D示意圖包含六柱與反射鏡子系統之完整MapleSim模型,3-D 示意圖則為MapleSim模型之動畫模式。
鏡射箱由 rigid body 與 rigid body frame 所組成,利用 rigid body frame 定 義質量中心到支柱連結端點的距離(如圖左側圖示),其另外的 rigid body frame 則定義反射鏡柱的位移距離(如圖右側圖示)。
.bmp)
鏡射箱系統模型示意圖
立即的結果應用是使用位置資訊減少餘弦誤差以提升光線追跡結果,並且幫助光 學系統的校準。模擬的結果可以用於確認廠商提供的查找表(此查找表提供的反 射鏡位置與方向為馬達致動器位置的函數),並延伸這些資訊取得未知的馬達位 置。
Alan Duffy 結語:「MapleSim 可以不用花費時間去推導系統的運動方程式 就可以很容易的模擬複雜系統的運動。」「MapleSim 提供我們精確的結果,而 且快速的模擬讓我們瞭解反射鏡如何依致動器的運動而移動。MapleSim 是極有 用而且功能強大的模擬工具,在工作上非常有幫助。」