利用MapleSim建立汽車雨刷機構模型與控制模擬
本文介紹如何透過MapleSim建立四連桿機構之運動模型,此模型將電動馬達的轉動輸出轉換為雨刷機構之往復運動,進行雨刷機構之控制模擬。(來源: MapleSim\Examples\Visualization\Wiper Mechanism)
一、設計考量
1.考慮雨刷與擋風玻璃之間的摩擦力,此摩擦力將採用軸承摩擦力(Bearing Friction)元件來給定。
2.當關閉雨刷時,雨刷必須自動回復到初始位置。
3. LED燈必須能提供以下的功能,此功能將透過MapleSim之3D visualization功能予以設計與呈現:
A.當開啟雨刷時,上方的LED亮紅燈,當關閉雨刷時不亮燈則以白色表示。
B.當雨刷通電時,下方的LED亮紅燈,當不通電時不亮燈則以白色表示。
1.考慮雨刷與擋風玻璃之間的摩擦力,此摩擦力將採用軸承摩擦力(Bearing Friction)元件來給定。
2.當關閉雨刷時,雨刷必須自動回復到初始位置。
3. LED燈必須能提供以下的功能,此功能將透過MapleSim之3D visualization功能予以設計與呈現:
A.當開啟雨刷時,上方的LED亮紅燈,當關閉雨刷時不亮燈則以白色表示。
B.當雨刷通電時,下方的LED亮紅燈,當不通電時不亮燈則以白色表示。
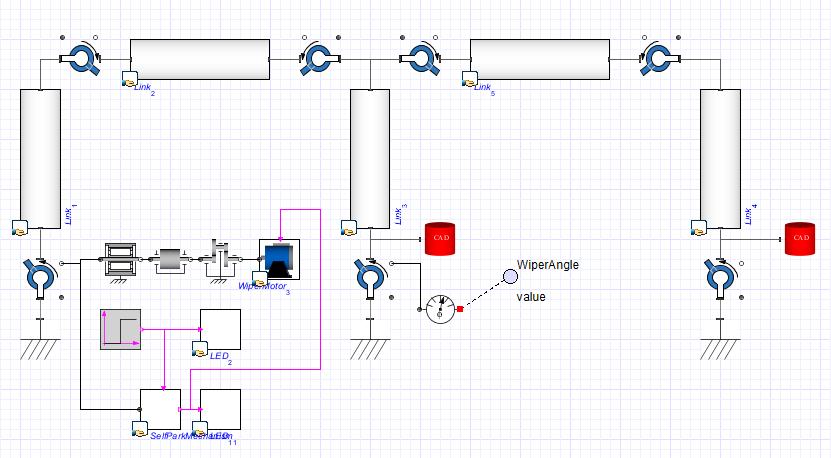
圖一、2D雨刷機構模型
.jpg)
圖二、3D雨刷模型示意圖
二、模型建構,將此模型分成兩大部分:
1. 機構運動模型,主要是利用基本桿件方式建立機構模型,主要應用元件庫為:
i. Multibody\Bodies and Frames
ii. Multibody\Forces and Moments
iii. Multibody\Visualization
iv. 1-D Mechanical\Sensors
1. 機構運動模型,主要是利用基本桿件方式建立機構模型,主要應用元件庫為:
i. Multibody\Bodies and Frames
ii. Multibody\Forces and Moments
iii. Multibody\Visualization
iv. 1-D Mechanical\Sensors
雨刷機構由四連桿所構成,其每一桿件(link)的基本架構均利用兩個Rigid Body Frame元件以及Rigid Body元件來組成單一桿件,其桿件示意圖如下(其中可以使用Rigid Body Frame表示桿長,由Rigid Body來定義桿子的重量與質心位置,利用這些元件來定義桿件時,可以讓桿件的形狀與質心位置定義擁有較大的彈性。)
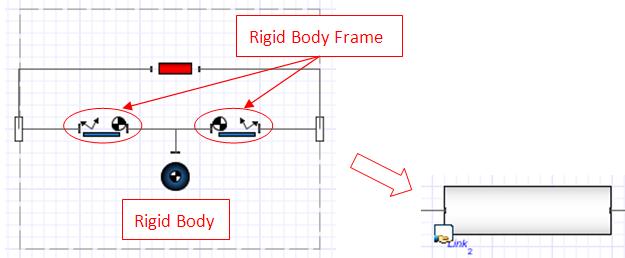
圖三、單一桿件建構示意圖
每個桿件之間的轉動接頭以Z軸(0,0,1)為轉動軸進行旋轉,雨刷機構運動模型之系統架構如下:

圖四、3D Visualization視窗中呈現的雨刷機構
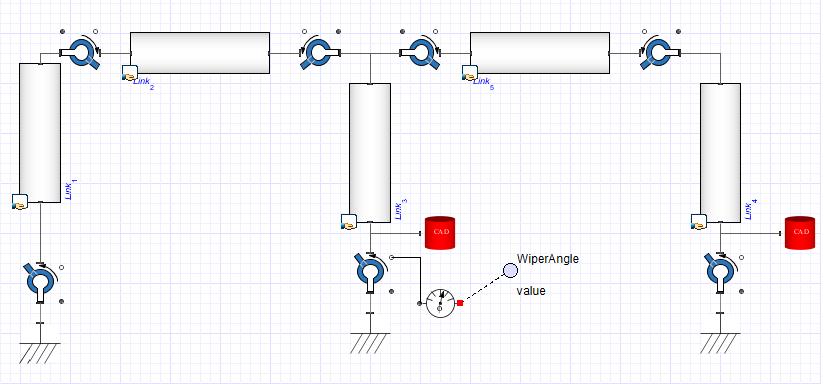
圖五、四連桿機械之MapleSim模型
2. 控制系統模型:主要是控制雨刷機構啟動與關閉,以及LED燈號切換顯示模擬。
主要應用元件庫為:
i. Multibody\Bodies and Frames
ii. Multibody\Force and Moments
iii. Multibody\Joint and Motion
iv. Multibody\Visualization
v. 1-D Mechanical\Rotational\Bearing and Gears
vi. 1-D Mechanical\Translational\Motion Drivers
vii. 1-D Mechanical\Sensors
viii. Electrical\Analog
ix. Electrical\Machines
x. Signal Blocks\Sources
xi. Signal Blocks\Signal Converters
xii. Signal Blocks\Boolean
主要應用元件庫為:
i. Multibody\Bodies and Frames
ii. Multibody\Force and Moments
iii. Multibody\Joint and Motion
iv. Multibody\Visualization
v. 1-D Mechanical\Rotational\Bearing and Gears
vi. 1-D Mechanical\Translational\Motion Drivers
vii. 1-D Mechanical\Sensors
viii. Electrical\Analog
ix. Electrical\Machines
x. Signal Blocks\Sources
xi. Signal Blocks\Signal Converters
xii. Signal Blocks\Boolean
雨刷運動控制系統模型如下圖所示:
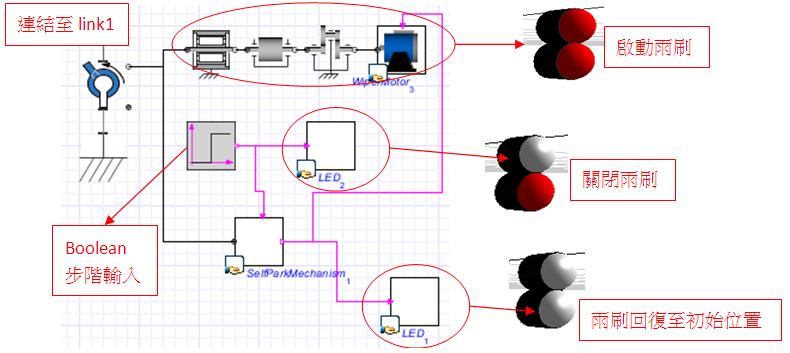
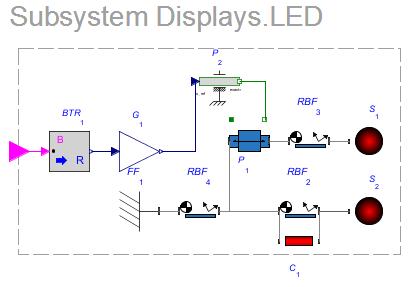
LED燈號控制模型如下圖所示:
三、系統控制模型模擬:
雨刷控制機制,使用Boolean Step訊號控制雨刷開啟與關閉,燈號on/off之門檻值設為0.05,當開啟雨刷時之訊號輸入為1、當關閉雨刷之訊號為0。模擬結果與控制機制分別如下:
1. 初始開啟雨刷(control_signal為1),LED燈為紅色,啟動馬達輸出旋轉運動,帶動與link1連結之轉動接頭,啟動雨刷,如圖八所示。
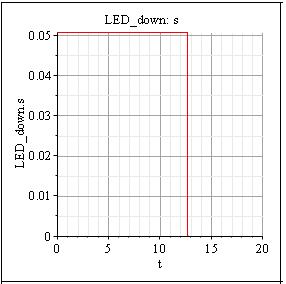
2. 當輸入訊號在第九秒之後轉為0,表示關閉雨刷,所以上方的LED燈號在9秒之後轉為白色,如圖九所示。
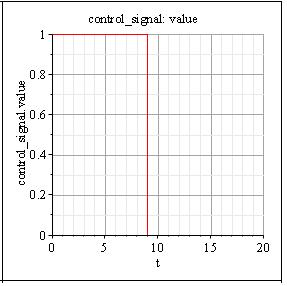
圖八、雨刷開關之控制訊號圖
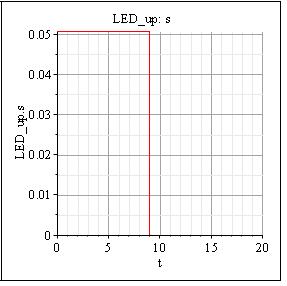
圖九、雨刷開啟、關閉之LED燈號顯示圖
3. 其中雨刷自回復原始位置之控制邏輯如下所示,當雨刷關閉之後,慢慢回復到原始位置,即當selfpark_angle回復至初始設定位置範圍內(大於2.9度並且小於或等於3.5度)時,下方的LED燈會轉為白色,雨刷動作停止。
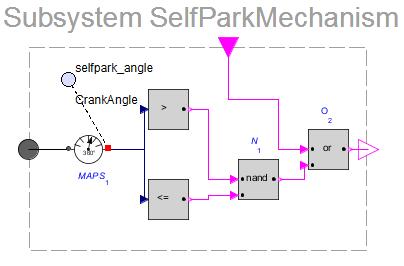
圖十、雨刷自回復控制邏輯架構圖
圖十一、雨刷回復初始位置之燈號顯示圖
4. 下圖十二為雨刷在模擬時間內所旋轉的角度,以及其往復旋轉之角度結果如下右圖十三所示。
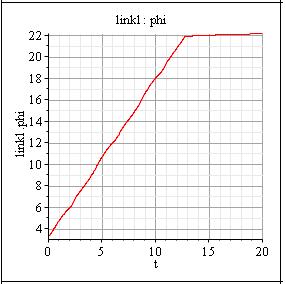
圖十二、雨刷旋轉角度
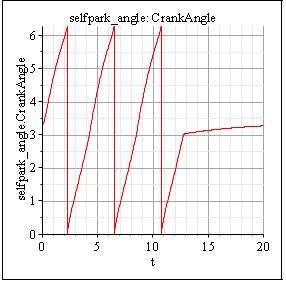
圖十三、雨刷之往復旋轉角度
結論:本文使用MapleSim建立雨刷機構之控制模型,並透過3-D動畫與可視化功能模擬機構之運動行為。透過控制訊號元件建立控制器,使用多體機構與一維空間機構運動元件建立雨刷機構模型,再加上馬達驅動系統以提供動力來驅動雨刷。同時使用可視化元件建立燈號顯示機構被控制行為,輕鬆建立具有多體機械運動,控制與結合馬達電機之多領域物理模型。