思渤科技 M²S 多物理域移動載具模擬器 為工程師與研究人員提供強大且靈活的自動駕駛 HIL 模擬平台,使開發者能夠在安全的虛擬環境中開發、訓練與測試自動駕駛算法,在投入自動駕駛車輛到實際道路測試前提供一個安全且具成本效益的替代方案,加速技術創新和商業化進程。
【應用情境】
|
|
|
||
|
|
|
||
|
|
|
 |
3D 圖形渲染 | 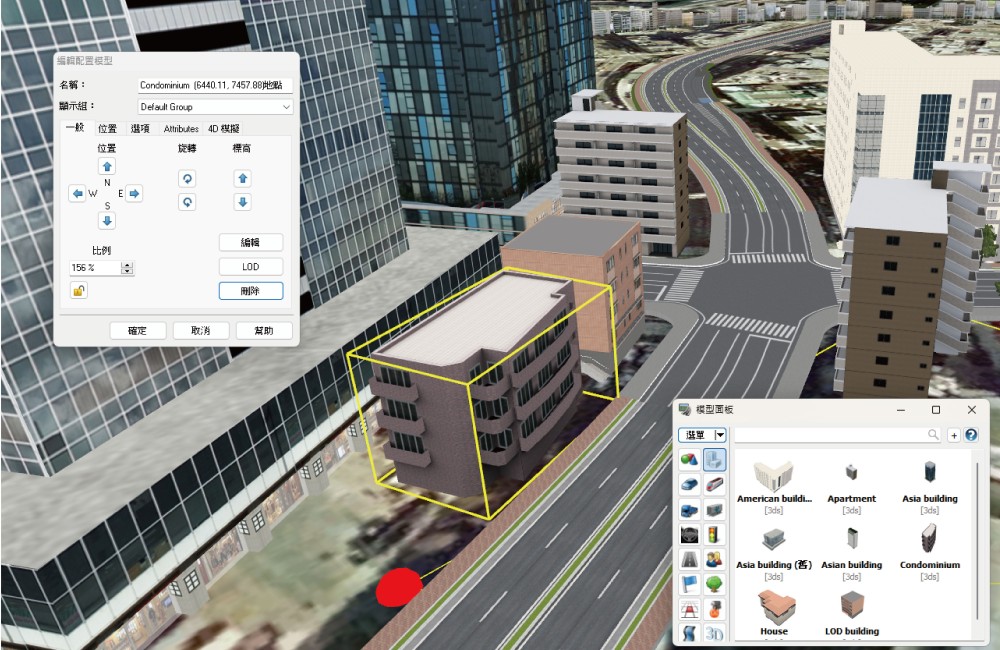 |
場景建模 | |
| 先進的圖形引擎 技術,創造高度逼真的虛擬環境與相機數據。 | 易於使用的場景建模介面,支援 OpenStreetMap 以及 OpenDRIVE 格式,可快速建立測試場景。 | |||
 |
交通流模擬 | 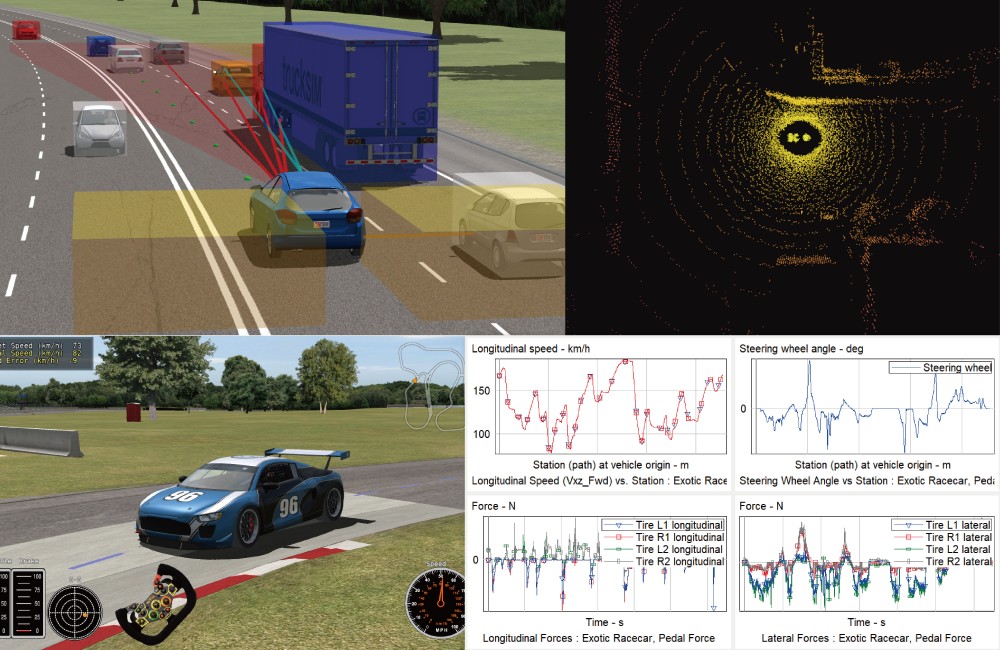 |
多物理模擬 | |
| 實現微觀與宏觀的交通流模擬,為自駕車提供完整的測試情境。 | 整合了複雜的物理引擎,精確模擬車輛動態以及感知器數據。 | |||
 |
即時模擬 | |||
| 可搭配與即時模擬系統,透過完整的車用通訊介面輸出,連接自駕車控制器進行 HIL 測試。 |
|
M²S 多物理域移動載具模擬器 與 CarSim Real-Time 車輛動態模型的整合為自動駕駛系統開發帶來了突破性進展,且為市場上第一個能夠進行即時模擬的自動駕駛系統 HIL 模擬平台。
■ 擬真場景 還原情境
高度擬真的虛擬場景,可以自定義路網、建築、天氣、光線等條件,模擬真實的駕駛情境,提供了一個可靠的感知平台。
■ 即時運算 狀態反饋
先進的物理引擎可以對車輛的動力學、感知器等進行精確建模,為控制器提供即時且準確的車輛狀態反饋。並且可以配置各種感知器,如攝影機、雷達和光達,並按照這些真實感知器的特性生成數據。
■ HIL 模擬 真實可靠
HIL 模擬允許在真實硬體環境中測試自動駕駛控制器,大幅提高了測試的真實性和可靠性。這一突破性技術為自動駕駛系統的開發、測試和驗證提供了前所未有的精確度和效率,顯著加速了自動駕駛技術的發展進程。
