



﹥ 如您有興趣取得相關資料,請與我們聯繫

本活動由思渤科技與北科大智慧車電研發中心聯合舉辦。
日期與時間
113年8月9日 (五) 13:00-17:00
地點
國立臺北科技大學(綜合科館610電腦教室)
議程
|
時間
|
議程
|
|
13:00-13:30
|
學員報到
|
|
13:30-14:00
|
自動駕駛之車輛動態控制
國立臺北科技大學 陳柏全 教授
|
|
14:10-15:00
|
當 CarSim 與 NI 相遇: HIL 建置基礎 I
思渤科技 吳宗軒 工程副理
|
| 15:10-16:00 |
當 CarSim 與 NI 相遇: HIL建置基礎 II
思渤科技 高育晟 工程副理
|
|
16:10-16:45
|
實車導覽展示
|
|
16:45
|
賦歸
|
|
實車導覽介紹
|
|
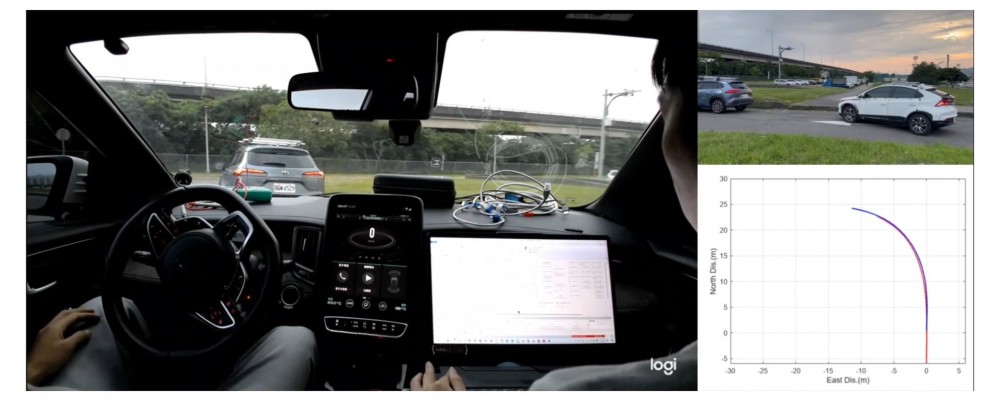 |
透過V2V車間通訊結合TJA控制系統,建立車輛隊列軌跡追隨控制系統,除了接收影像感知模組資訊,並透過V2V通訊得到隊列中車輛資訊,設計時間車距控制器及軌跡追隨控制器,以維持更小的時間車距,並跟隨前方車輛的行駛軌跡,提升隊列的行車舒適性、效率和安全性。
|
注意事項
-
本活動歡迎學員自備電腦,試用之軟體會於活動前三天通知載點。
-
本活動採註冊制,報名成功並經資料確認後,我們將於活動前3天以電子郵件方式寄發會前通知至您的電子信箱(請確認email資料正確性)。
-
本活動報名截止日為 8月2日(五)。主辦單位將視報名狀況提前或延後報名時間。
-
主辦單位保留變更議程順序 、內容及相關事項之權利。
若遇不可預測之突發事件或招生人數不足等因素,主辦單位保有活動調整之權力。
如有任何問題請來電 03-6118-668 #321 或 寄信 Wayne.liang@cybernet-ap.com.tw
﹥ 如您有興趣取得相關資料,請與我們聯繫