透過MapleSim使得能量再生最大化來提升輔助設備的可能性
人類、動物與機器人運動的研究大部分一直集中在提升日常活動上,例如走路、跑步、轉彎、起步、加速與減速。然而,對於如輔助起立與坐下這類相對簡單,但隨著年紀與健康衰退而變得困難的運動所付出的關注卻不太多。
在最近幾年研究人員已經開始推動生產更多實用和精簡的設備來輔助這些運動。最近,人形機器人的研究領域開始對提升現有輔助機械的能源使用效率產生興趣。
James Andrew Smith博士目前為加拿大約克大學Lassonde工程學院的成員,與Ryerson大學研究團隊用Maplesoft公司開發的多領域建模與模擬工具,研究蓄電池在人形機器人與輔助電子設備的工作情形。Smith的團隊研究的目標為找出矯正器或義肢在起立與坐下之間可被再生的能量,就像是混合動力汽車煞車期間,經由馬達獲得再生能量然後再提供給汽車使用。
找出踝關節、膝關節、髖關節三個節點在坐下與起立的運動中哪個部份最能夠再生能量,將能夠證明再生能量在復健工程設計上為重要而且實際的考量。這個結論將引導出更有效率的設備提供給那些因為疾病或是無法控制關節周圍的肌肉而飽受行動不便之苦的人。
為了成功找到正確的再生能量最大值,Smith團隊將人體試驗的生物數據應用在MapleSim中的機器人模型,機器人模型模擬人類在座下與起立時的運動行為。為了調查踝關節、膝關節、髖關節的能量再生,他們在MapleSim機電系統啟動器模型的每個節點上置入直流轉換器與電池元件。
為了生產出最佳化的復健設備,並且是可以在日常生活中使用的,系統必須要運作在自己的電力系統中,Smith的研究團隊使用含有啟動器、電池與H橋的再生能量煞車電路,來分析坐下與起立運動過程中各個階段所消耗與再生的能量,煞車電路經由傳動的連結,利用相反的電動勢產生的電壓來對電池充電。一般情況下,電池提供正向電力給馬達,但是在再生能量煞車電路中馬達扮演生產的角色,反向的電力可以回流到電池中進行充電。
「我們的團隊需要有複雜化學反應的電池模型,這在許多傳統的軟體工具上很難找到。」Smith說道。MapleSim的鎳氫電池模型模擬電池的電化學反應與熱力學行為,透過一組相互連結的等效電子元件來描述電池的公式。Smith指出「MapleSim的電池元件庫節省了我們團隊大量的時間與工作,因為我們並不需要重頭建立電池模型,我們的起點是從已經準備好的先進電池模型開始,然後快速且輕易的編輯它,來符合我們計劃中的需求。」Smith的團隊還使用了Maplesoft官方網站上提供的H橋直流轉換器模型,來處理鎳氫電池與啟動器之間的電力傳輸。
Smith研究團隊用MapleSim開發了兩個模擬模型。首先,建立一個簡化的腳底與地面的接觸關係,這將使研究人員能夠建立一個高效能低複雜度的運動控制器基礎模型,接下來這個控制器被應用到更複雜與實際的人體模型的腳,模擬腳離開地面的情況。從人體試驗所得的數據被應用在MapleSim中的多領域模型運動軌跡,這個設計被限制到十分之一的大小,實際使用Dynamixel RX-28啟動器的小型機器人上。Smith解釋:「在MapleSim的多領域環境中,我們可以準確的模擬必要的運動行為,來分析正確的蓄電池管理策略。」
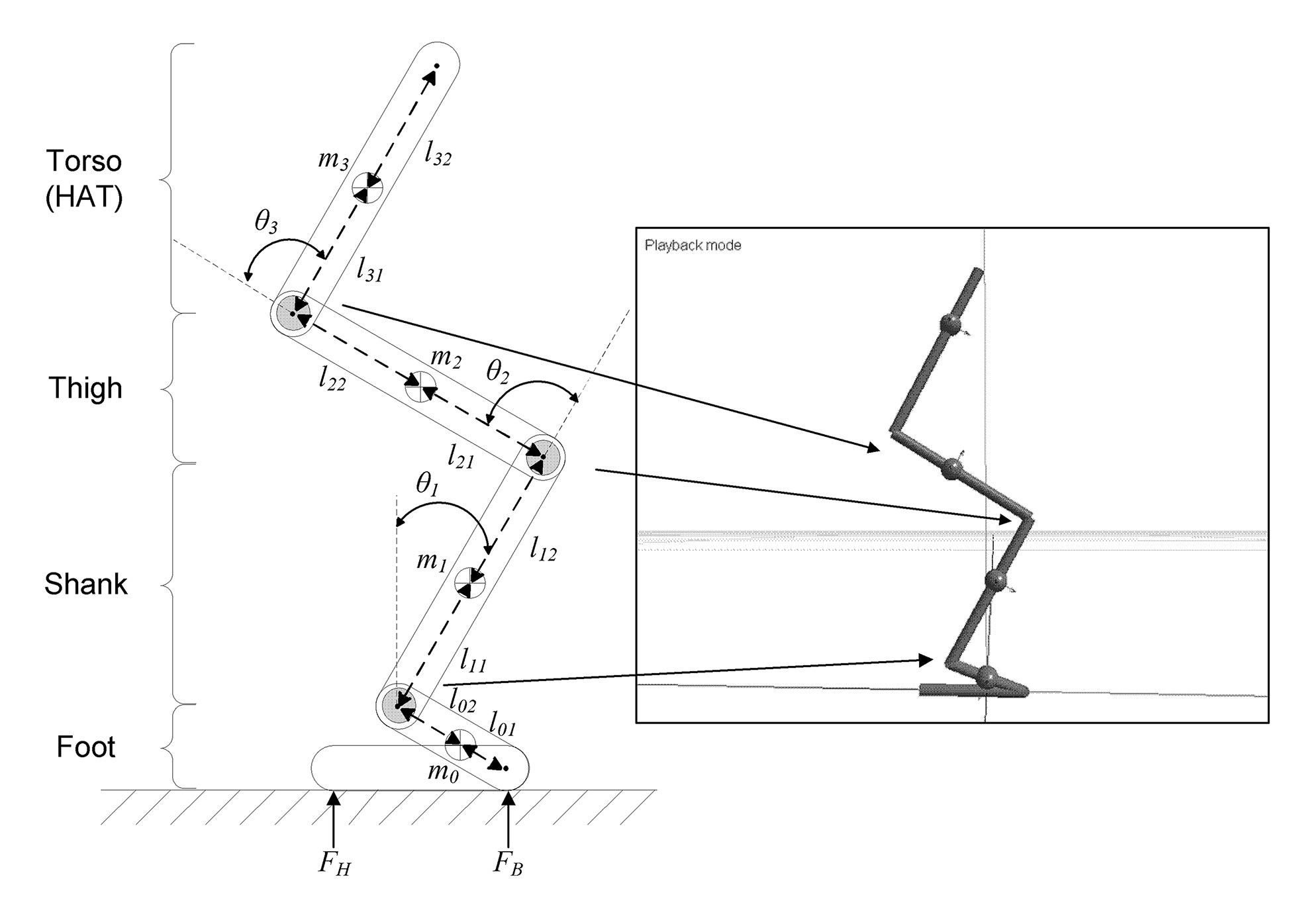
圖一: 機器人腳部的動力學模型,包含三個啟動器節點與兩個與地面的接觸點
為了確定最高再生能量的發生點,研究人員將Dynamixel RX-28啟動器應用在人形機器人準確的生物力學運動中。在坐下與起立的每個轉變過程中,踝關節、膝關節、髖關節的電荷狀態都隨著時間變化繪製出來,當作標示電池容量的每個階段。
坐下與起立的運動模擬從模型座在虛擬的椅子上開始,當模擬開始,機器人從椅子上起立,電荷的狀態隨著時間下降,代表電力從電池中被抽離,一但身體移動到腳的上面,髖關節開始制動並且產生再生能量。這樣的情況也發生在坐下的運動過程中,當身體的質量中心保持在腳的上面時。相較於髖關節,踝關節與膝關節的子系統在整個過程中產生的再生能量非常少量。Smith的團隊也證實再生能量在坐下的過程比起立的過程要為顯著。
坐下與起立的運動模擬從模型座在虛擬的椅子上開始,當模擬開始,機器人從椅子上起立,電荷的狀態隨著時間下降,代表電力從電池中被抽離,一但身體移動到腳的上面,髖關節開始制動並且產生再生能量。這樣的情況也發生在坐下的運動過程中,當身體的質量中心保持在腳的上面時。相較於髖關節,踝關節與膝關節的子系統在整個過程中產生的再生能量非常少量。Smith的團隊也證實再生能量在坐下的過程比起立的過程要為顯著。
.jpg)
Highlight:
-
研究團隊利用MapleSim研究人形機器人與電子輔助設備的蓄電池工作管理策略,確定在坐下與起立的運動過程中可以產生再生能量的部分
-
為了確定再生能量的最大值,研究團隊將人體試驗的生物數據應用在MapleSim中的機器人模型,軟體的多領域環境幫助提供模擬所需要的運動軌跡
-
確保最有效率的電池管理,代表可讓這些設備的工作時間可以被延長,而且採用更小更輕的電池將可以減少設備的重量。